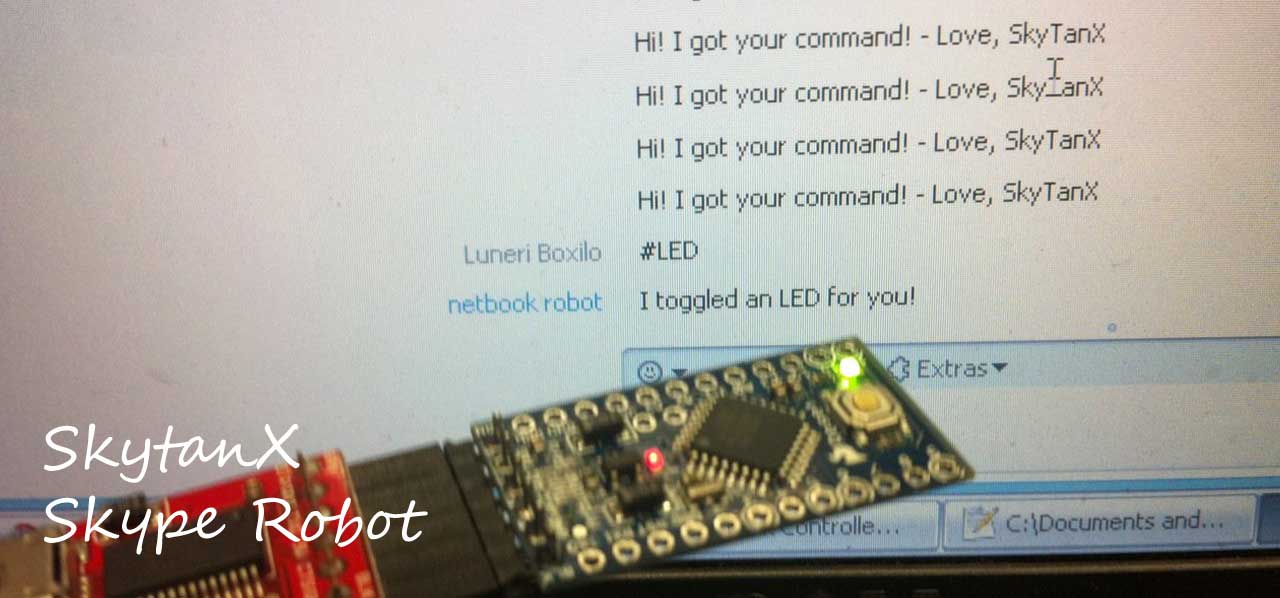
SkyTanX is a Telepresense robot that uses Python and Skype. Using its skype account, users can call the robot and receive a video/audio feed of the robot's camera. The user can then either type in commands, or use a virtual joystick system (image processing) to control the robot. The entire system is setup-free on the client side to make it easy for any user with Skype to control the robot.
SkyTanX prototype test
#include <QApplication>
#include <QFileDialog>
class Tester : public QWidget
{
public:
void openFile()
{
QFileDialog::getOpenFileName( this, tr("Open Document"), QDir::currentPath(), tr("Document files (*.doc *.rtf);;All files (*.*)"), 0, QFileDialog::DontUseNativeDialog );
QString filename = QFileDialog::getOpenFileName(
this,
tr("Open Document"),
QDir::currentPath(),
tr("Document files (*.doc *.rtf);;All files (*.*)") );
if( !filename.isNull() )
{
qDebug( filename.toAscii() );
}
}